Example collection
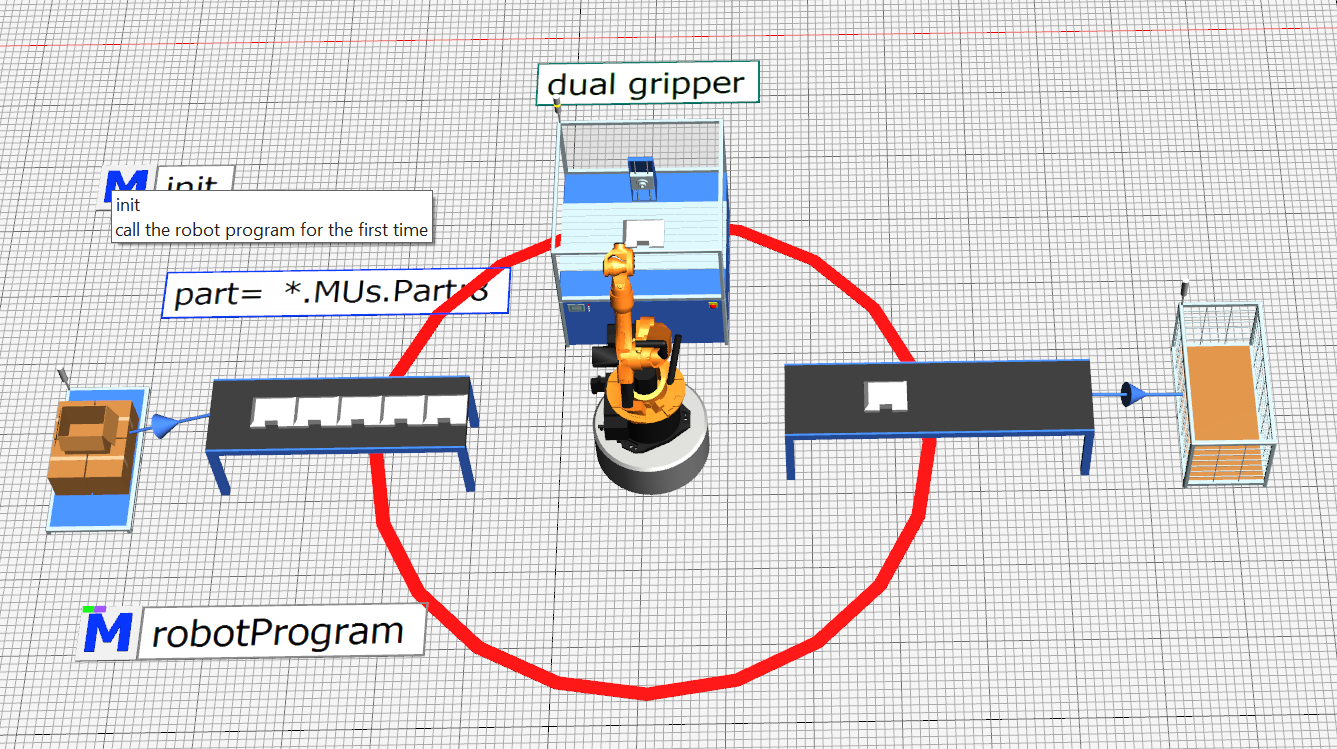
robot 3D dual gripper
load and unload machines using a dual gripper (joints and poses), base of the robot is ParallelProc
Training-ID: 848
Date: 11.03.2021
Necessary libraries:
Tested with: Plant Simulation 16
NEW August 2020
If your browser download the example as a MS Word file (.doc) or .html, please change the file extension to .spp .