Example collection
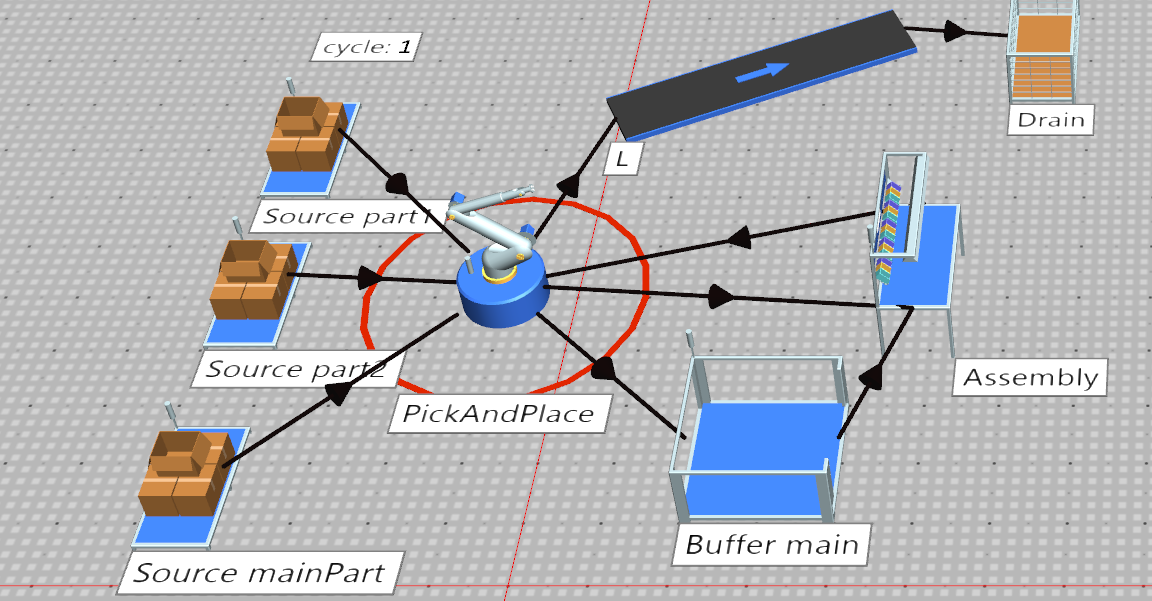
assembly with PickAndPlace (variant 2)
model assembly processes with PickAndPlace robots; this example uses a cycle control (exit control of the sources) and the exit strategy MU-attribute (attribute previousLocation)
book example 7.11 (2nd edition)
book example 7.12 (3rd edition)
book example 7.11 (2nd edition)
book example 7.12 (3rd edition)
Training-ID: 784
Date: 25.03.2026
Necessary libraries:
Tested with: Plant Simulation 2404
NEW August 2020
If your browser download the example as a MS Word file (.doc) or .html, please change the file extension to .spp .